 Click to enlarge; copyright Gert van Dijk
Click to enlarge; copyright Gert van Dijk Click to enlarge; copyright Gert van Dijk
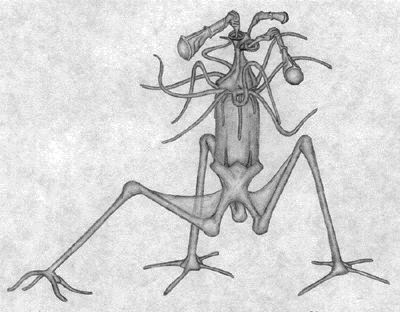
Click to enlarge; copyright Gert van DijkYou will find the Shuffler on the land page, but here it is again. I could not resist adding some additional information here. At first glance you may wonder where the woolly hairs are, as the animal looks somewhat naked. Well, the hairs are underneath.
There are various ways in which animals can combat heat loss in a cold environment. Behavioural solutions are to stay indoors or sleep through the winter. There are anatomical tricks as well; a good principle is to be as round as possible with as few protruding parts as possible, in order to get a small surface area for a given volume. So, expect small ears, short tails and thick legs for animals in cold climes. A second anatomical trick is to be large, as it is easier for a large animal to conserve heat. There are metabolic and circulatory tricks as well, but a good theme is insulation. Layers and layers of fat wrapped around the more costly parts of the body will help, and as an aside these can store food as well. One of the best insulating materials is air. Fur works because the hairs trap air near the body, preventing the freezing effects of wind to reach warm parts of the body. Fur on Earth works quite well, and various animals have such sophisticated fur designs that they can withstand horrible conditions. Just consider hair that traps sunlight, leading the warming radiation into the body; hairs that are fairly thick but hollow, so they trap even more air; or consider fur made of layers of hairs with different characteristics. But such furs can still get wet, and while even that can be solved -think of polar bears- there is another way to protect against wind chill, and that is the ways humans do it.
Humans? Naked apes? I am talking about clothing. Animal pelts must have been among the first items of clothing, and among women of a certain class, a certain age and a certain cultural background fur coats are still in vogue (I cannot help but think -and sometimes say- that all fur coats are second-hand clothes, and that they invariably looked much better on the first owner). Fur coats work, but modern polar clothes are a miracle of ingenuity. They invariably have fibres to trap air much as hairs in furs do. But there is usually an outer layer of wind-breaking material to stop the trapped air from mingling with the really cold outside air. Animals don't have that, for the simple reason that it would not be easy to enclose large areas of air inside the body (oh well, Furahan tetrapterates do, but that is another story).
Once again, humans solved that particular riddle. Some brilliant Eskimo / Inuit must have realised one day that coats made of fur work even better when you wear the furry side of the pelt against your skin instead of on the outside. That was a stroke of genius, I think, but it is not listed among other great humans inventions such as fire, wheels and gossiping (the probable reason for the evolution of speech). I expect that women who like fur coats do not know this, and suspect they would ignore it anyway.
That Eskimo's idea is behind the fur coat of the Shuffler. Its skin forms folds, and the inside of the fold is covered in woolly hairs, while the outside is devoid of hair. The fold is dead, in fact. This might be as near as the 'Eskimo Invention' as biological evolution can get starting with hair on the outside of a body. The main downside is that investing in large amounts of skin and hair for just one season's worth of protection is costly in metabolic terms, so I played with alternative ideas, such as letting them keep their folds all year. Or perhaps they eat the skin when it falls off, in a rather unappetising manner.
---------------------------------
As you can see, I made some other changes to the web site as well:
I added a new book, on Warren Fahy's 'Fragment'. This is probably the only fake book in the entire New Hades catalogue of fake books that will one day likely be turned into a real book!. It is on the book page, of course.
The list of links has been reworked too, see the 'about' page. Snaiad is gone, but I will put the link back again when Nemo chooses to find a new host. Then again, Nereus is there now...
The illustration on the site's front page has been changed as well; no new items there, but I think it looks better now.
Finally, I have written too many posts on this blog: it keeps me from actually painting new Furahan life forms. Next year, I will probably reduce the frequency of posts to perhaps once every two weeks. We'll see. I do have some ideas for good subjects though. Meanwhile, please consider telling all women with fur coats, except for the ones you really like -the women, not the coats-, that they should wear their coats with the fur on the inside.









{kind=link}